记一下PID Rate分别代表的什么意思.
一般情况下, 飞控自带的默认的PID完全可以飞行, 像我这种刚入门的酸菜鱼, 其实还是应该保守一点, 多飞行, 多掌握手感, 循序渐进的来了解飞控的相关知识.
穿越机使用PID控制算法来控制穿越机的飞行姿态以及速度等, PID也广泛使用在其他工业控制中. pid 是proportion integration differentiation三个英文单词的首字母缩写, 其中文意思是 比例, 积分, 微分.
P 比例控制, 可以想象成穿越机油门的作用, 即想要飞机飞到一定的高度, 油门越大, 飞机越快的达到预定的高度, 但是如果即将达到预定高度时没有减小油门控制, 那么飞机就会超越目标, 达不到我们想要的结果. 可以简单的理解为P值越大, 飞机越快的达到预定的目标.体现在飞机上就是越跟手,但是也会造成过冲.所以需要引入D, 使用D的反作用力来抵消过冲
D 微分控制, D的大小体现在飞机运动时的阻力上, 在没有D值, 只有P值时, 越大的P,飞机反应越灵敏, 但是在将要达到既定目标时,没有阻力, 飞机就会像弹簧一样沿着既定目标震动; 引入D后, 飞机将要达到既定目标高度时, 就会有阻力, 反方向的力使得飞机停留在既定目标的高度, D越大, 阻力就会越大, 体现在飞机上D越大, 飞机的直观反应就是变得肉了.
I 积分控制, 由于飞机会不停的受到外界的干扰, 所以飞控会不停的检测位置是否存在误差, 如果这个偏差越大, 存在的时间越长, 就会产生一个力来抵消这个偏差.
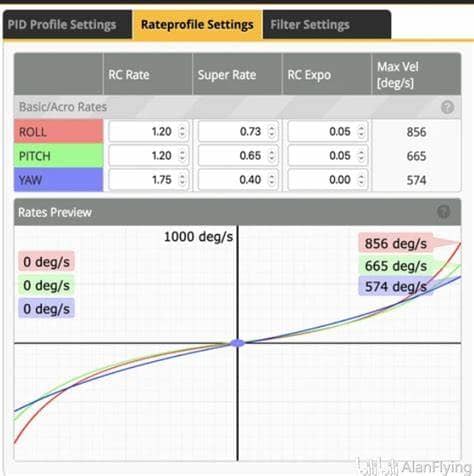
RC Rate 全比例提高角速度,提高RC Rate就意味着提高了遥控器全范围摇杆的灵敏度
Super Rate 提高摇杆末端的角速度, 同时中位附近的角速度也会稍微增加
RC Expo 降低中位附近的角速度
一般情况下, 需要高rate的话, 就稍微提高RC Rate, 稍微拉高一点Super Rate, 为了平稳飞行的话, 就要提高RC Expo来降低中位附近的角速度.
网上随便找的一张图 rate