在这里记录装好机后是怎么来调整这架飞机的,记忆力不行, 只能写在这里,方便日后其他飞机也可以按照这个思路来调整。
1. 开启RPM滤波
一些AIO飞控的ESC是BLHeli_S 的8位电调,这样的情况下没办法打开双向D-SHOT,也就没办法开启RPM滤波,解决办法就是刷Bluejay固件
BLHeli_32 ESC 默认就是开启双向D-SHOT的,也就可以直接开启RPM滤波
1.1 刷蓝鸟固件
-
通过ESC Configurator 来在线刷蓝鸟固件;
-
B站大佬给M7刷蓝鸟固件介绍的很详细;
-
有时候刷蓝鸟固件会因网络问题不能在线刷,就需要把固件下载到本地,选择加载本地固件来刷;在这里下载固件,前提要知道自己固件是什么开头的;不能刷错了。
1.2 开启双向D-SHOT
- 在Betaflight4.3版本中,需要在电机页面中开启双向D-SHOT;
- 要选择正确的电机磁极数,标准的5寸(穿越机)电机有14个磁极,因此14是默认设置。较小的电机通常有12个磁极;
- 在betaflight官网中关于选择DSHOT300还是DSHOT600有介绍,大概意思就说:PID速率为8k,则必须使用Dshot600,PID速率为4k,例如8k/4k或4k/4k,请使用Dshot300以获得最高可靠性。
1.3 开启RPM滤波
- 在 betaflight PID调节模块中开启RPM滤波;
- 在betaflight官网中调参模块介绍 RPM滤波器可以在不增加太多延迟的情况下清除几乎所有的电机噪声,从而完成繁重的滤波工作。
- 还需要低通滤波器来抑制因轴承、风和湍流带来的一般“垃圾”噪声;
- 还需要开启动态陷波滤波器来抑制频率特性固定的机架共振噪声。
2. 调PID
2.1 准备
-
需要正确设置黑匣子数据;以2K进行采样,模式选择GYRO_SCALED;
-
需要用到PIDToolbox分析工具;工具下载链接;
-
需要在PID模块先将DMax、FF增益、以及I增益滑块移动到最左边;
-
别的滑块可以保持默认,即在1的位置。
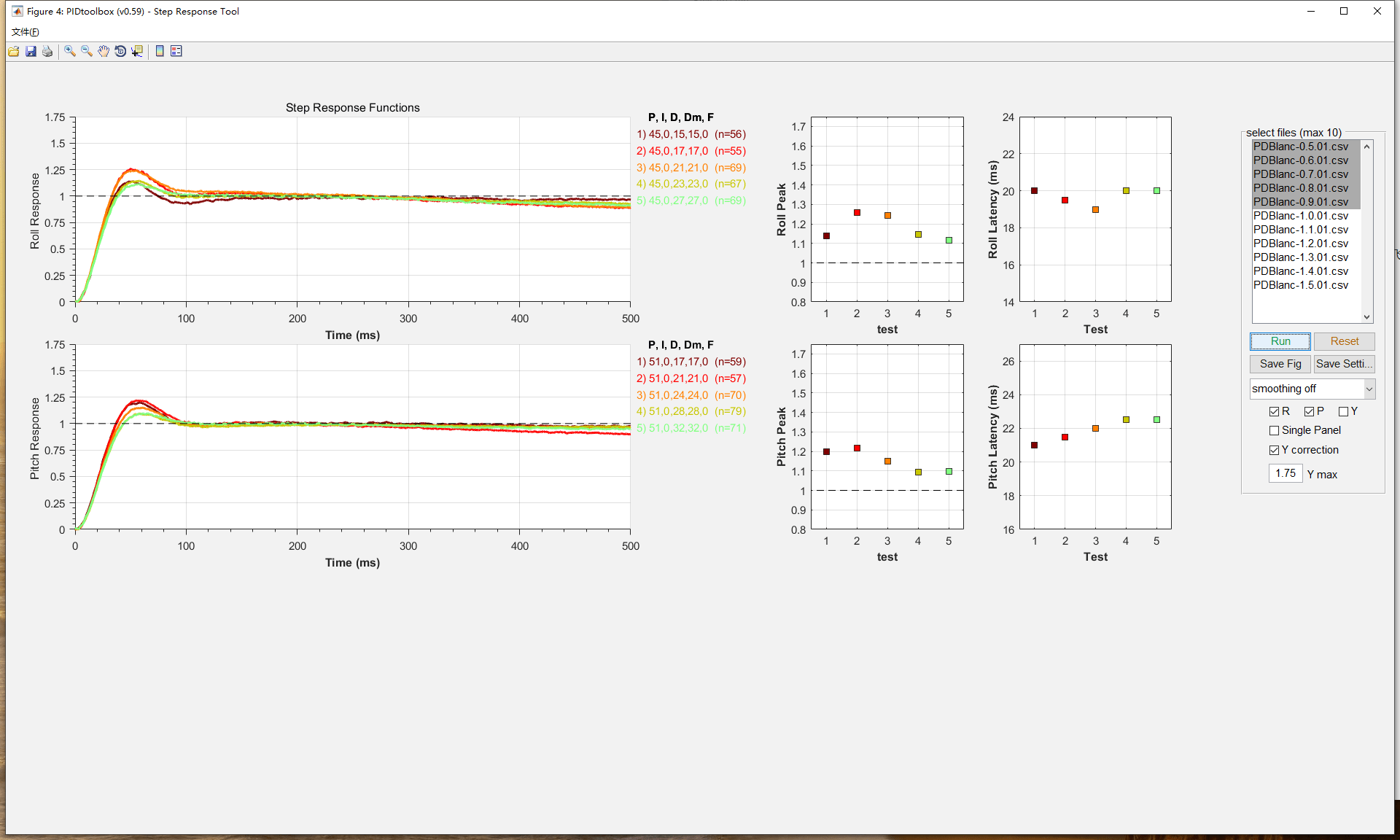
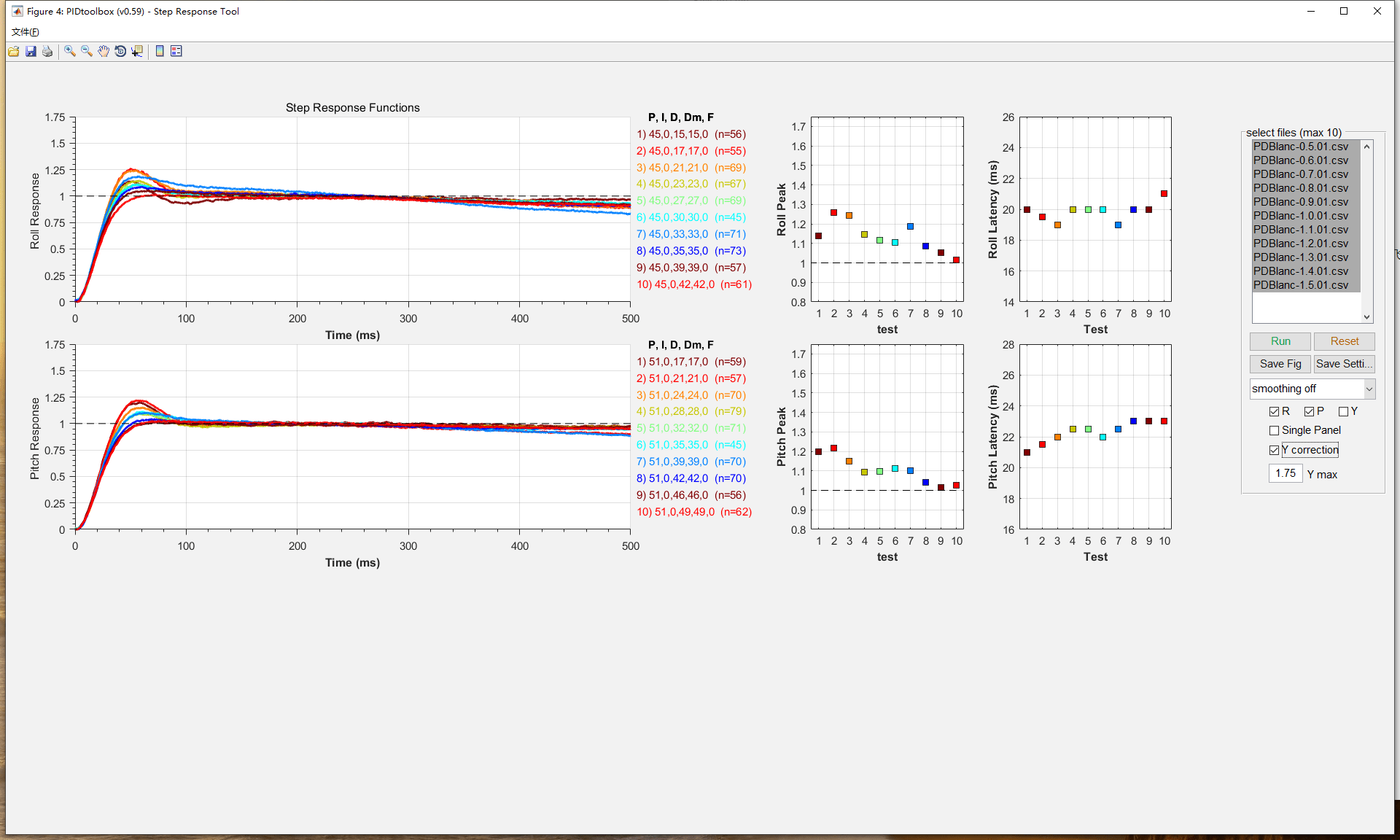
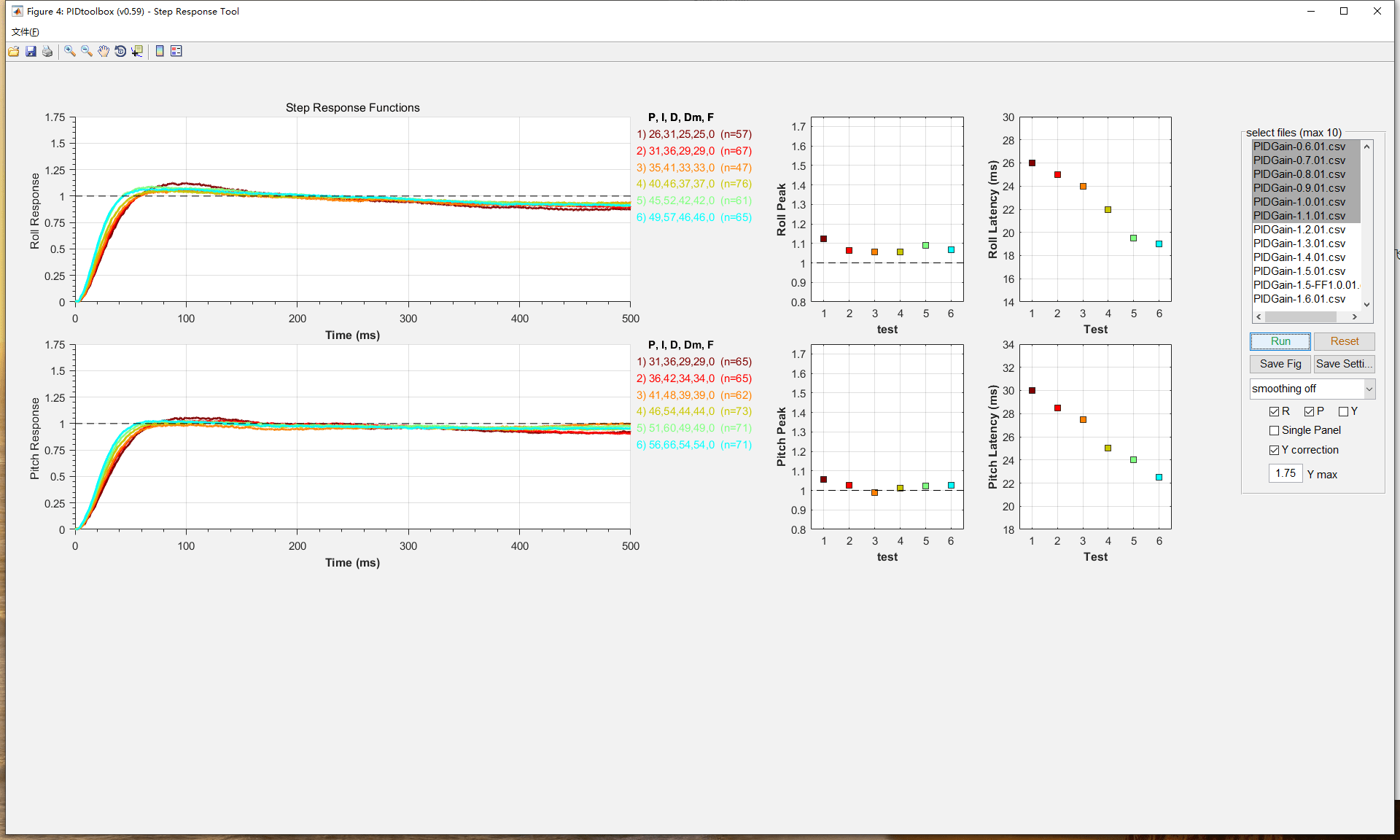
2.2 调整PD平衡
- PD平衡是DTerm滑块来实现的;
- 上面视频中DTerm滑块从0.6开始,每次增加0.2一直到增加到2.0,每次调整新的DTerm值后飞机飞20~30秒即可;
- 我在星环25飞的时候从0.5开始每次增加0.1一直到增加到1.5,发现DTerm为1.4时,比较满意。
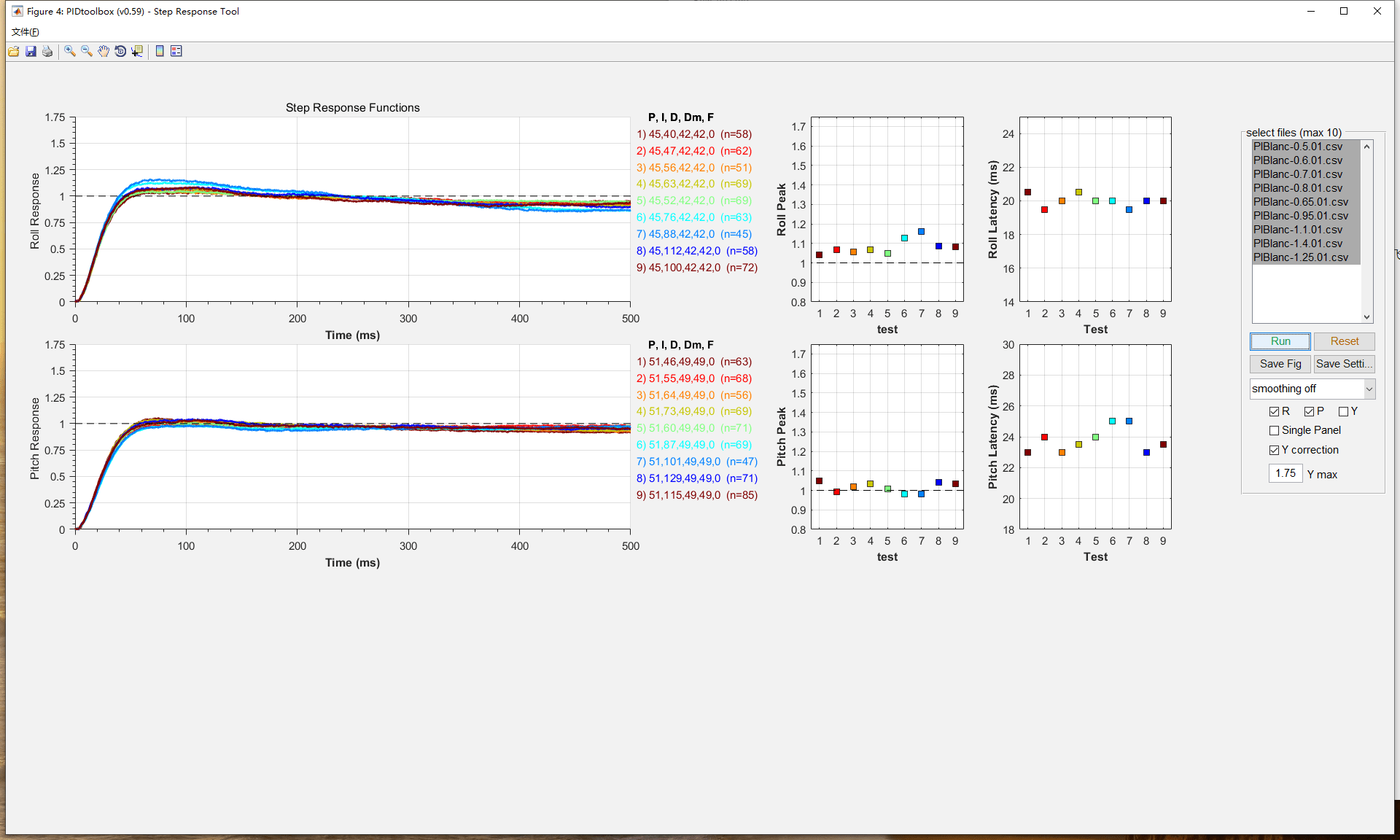
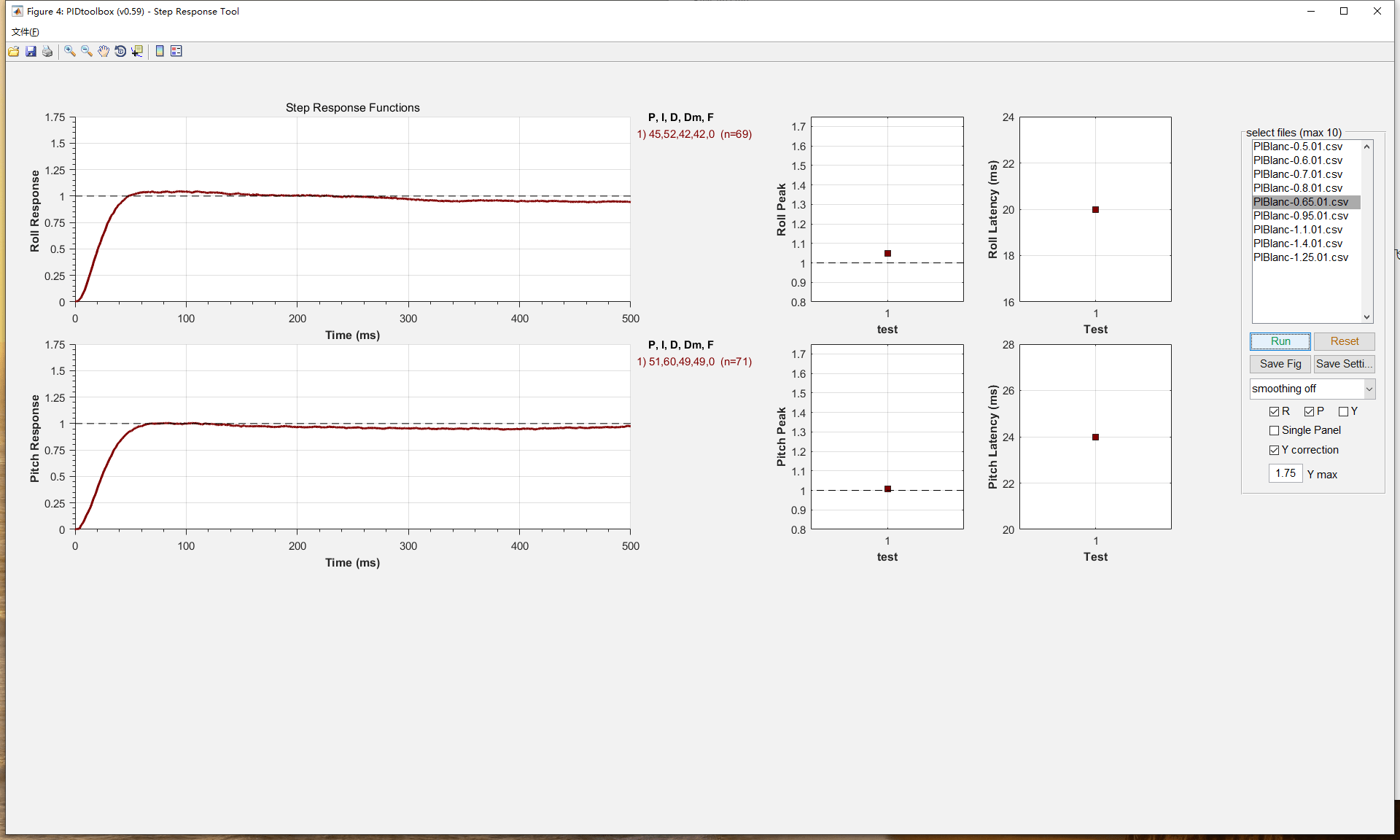
2.3 调整PI平衡
- PI平衡是通过I增益滑块来实现的;
- 上面视频中I增益滑块从0.3开始每次增加0.3一直增加到1.8;
- 我在星环25飞的时候从0.5开始每次增加0.15一直增加到1.4,发现I增益在0.65时效果最好
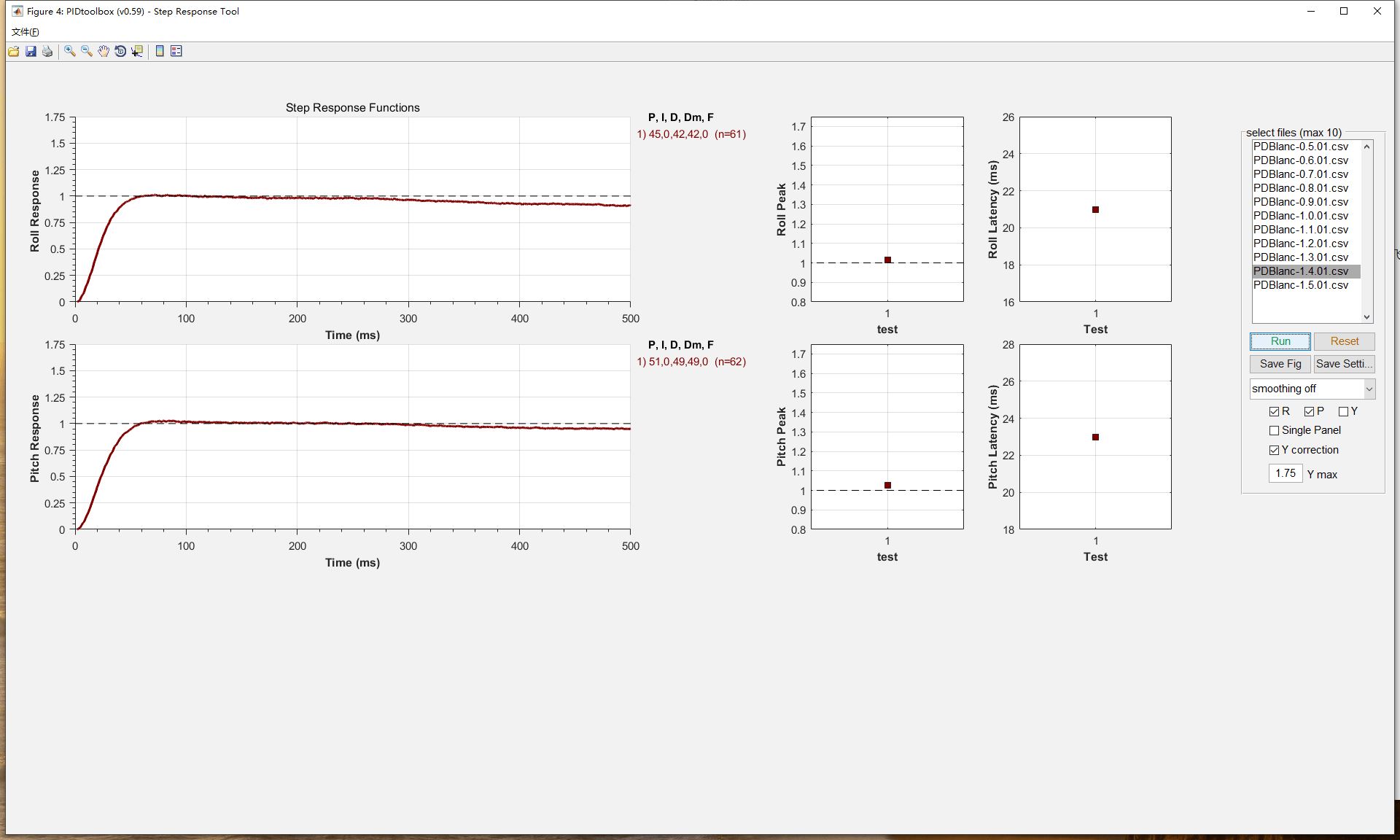
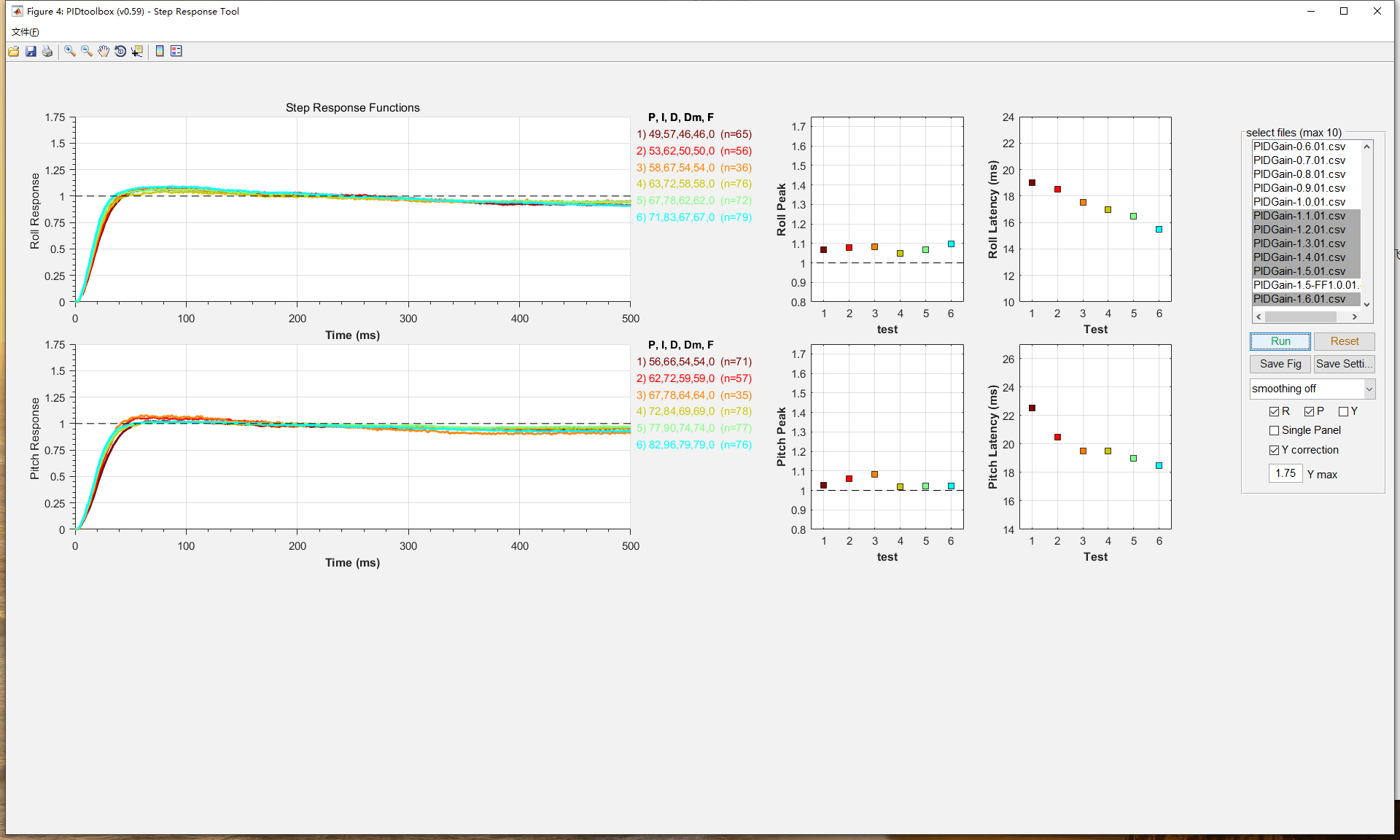
2.4 通过主乘数滑块最终找平衡
-
主乘数滑块从1.0开始一直到1.8
-
我在星环25中从0.6开始一直到1.7,最终发现在1.5时效果最好
-
-
-
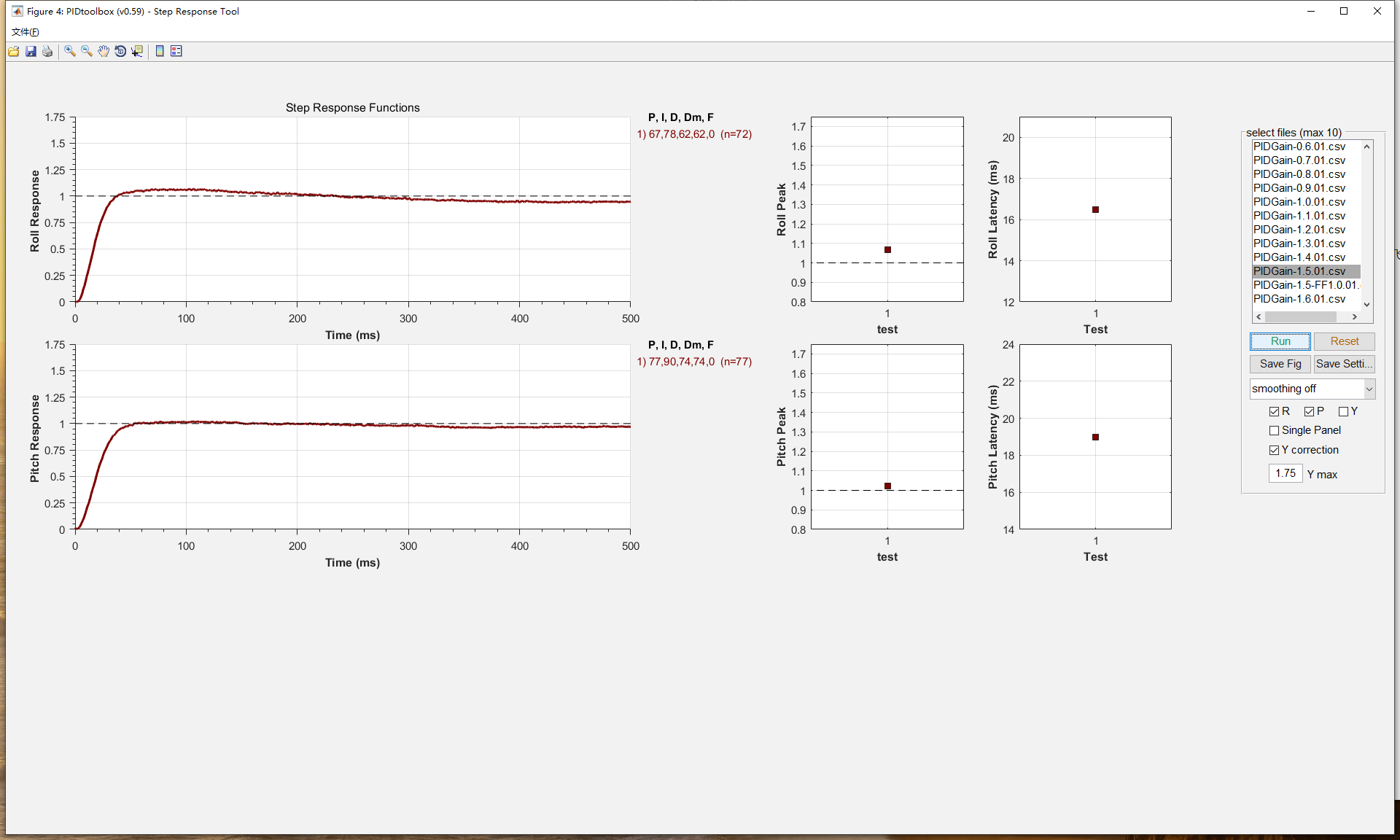
2.5 调整FF增益
- 上面视频中FF增益滑块并没有一次一次去试飞,而是直接调整到了0.9或者1.0;
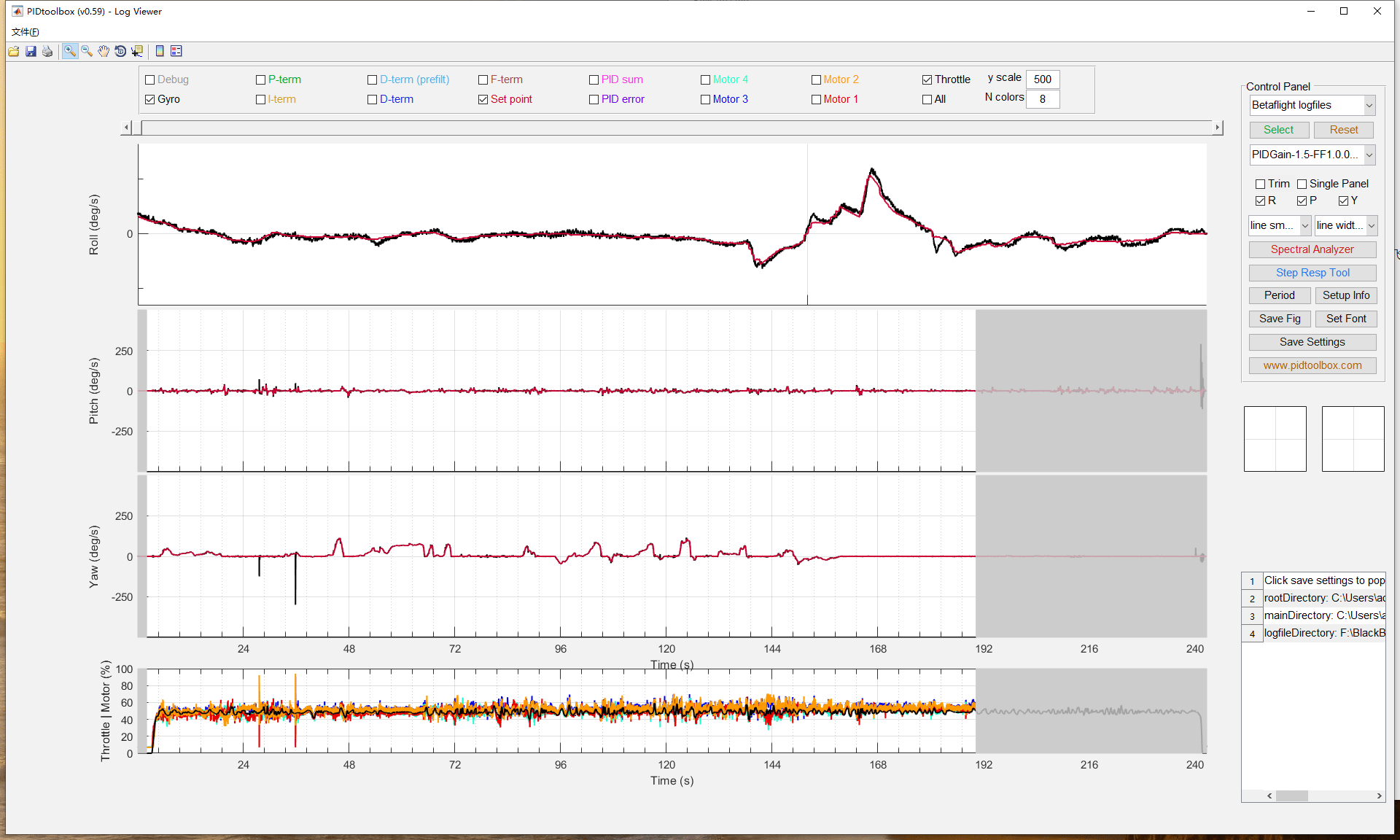
- 如上图中ROLL图所示,通过调整FF增益黑色线红色线基本上是贴在一起的就可以了。